آموزش رباتیک
+ نوشته شده در دوشنبه ۸ خرداد ۱۳۹۱ ساعت 16 توسط زهرا بطنی
|
دیودها (به انگلیسی: Diode) جریان الکتریکی را در یک جهت از خود عبور میدهند و در جهت دیگر در مقابل عبور جریان از خود مقاومت بالایی نشان میدهند. این خاصیت آنها باعث شده بود تا در سالهای اولیه ساخت این وسیله الکترونیکی، به آن دریچه هم اطلاق شود.

از لحاظ الکتریکی یک دیود هنگامی عبور جریان را از خود ممکن میسازد که شما با برقرار کردن ولتاژ در جهت درست (+ به آند و - به کاتد) آنرا آماده کار کنید.

تَراشه یا مدار مجتمع (که برابر فارسی chip یا آیسی: IC یا Integrated circuit به زبان انگلیسی است) به مجموعهای از مدارات الکترونیکی اطلاق میگردد که با استفاده از مواد نیمهرسانا (عموماً سیلیکون همراه با میزان کنترل شدهای ناخالصی) در ابعادی کوچک (معمولاً کمتر از یک سانتی متر مربع) ساخته میشود.
لطفا به ادامه مطلب مراجعه کنید.

ریزپردازندهها تراشههای کوچکی هستند که میتوانند عملیات حسابی و منطقی را انجام دهند. این تراشهها از تعداد بسیار زیادی ترانزیستور ساخته شدهاند.
لطفا به ادامه مطلب بروید.
.jpg)
لطفا به ادامه مطلب بروید

لطفا به ادامه ی مطلب بروید
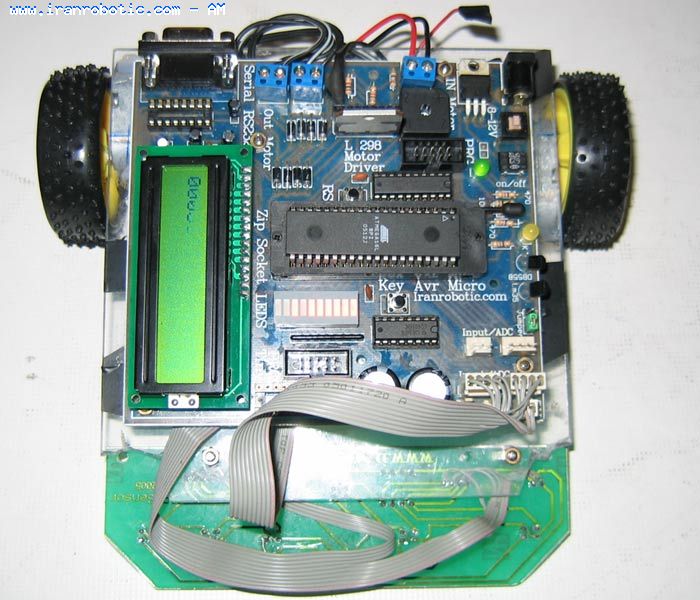
برای ساخت یک ربات مسیر یاب باید با سه رشته مکانیک , الکترونیک , کامپیوتر ( برنامه نویسی ) آشنایی مقدماتی داشته باشید.
مکانیک

مکانیک یک ربات مسیر یاب از 4 بخش تشکیل شده است که به برسی هر کدام می پردازیم:
1- شاسی یا بدنه که تمام اجزای ربات مانند برد ها و ... روی آن قرار میگیرد
2- موتور ربات مسیر یاب
3- چرخ ربات مسیر یاب
4- برد سنسور که وظیفه تشخیص خط زیر ربات میباشد
این قسمت از مکانیک ربات مسیر یاب که وظیفه نگه داری تمام اجزا و مدار ها بر روی خود میباشد که اجزای ربات بر روی آن بسته میشوند و میتواند یک طلق پلاستیکی یا یک تکه چوب یا یک چیزی که نسبتا سبک باشد و بتواند این اجزا را تحمل کند
موتور یک ربات مسیریاب




یک ربات میتواند از دو نوع موتور استفاده کند که عبارت است از :
DC MOTOR
Steper Motor
شما برای یک ربات مسیر یاب به دو موتور خوب نیاز دارید که یکی برای چرخش به راست و دیگری برای چرخش به چپ که توصیه میشود این موتور ها رو در عقب ربات نصب کنید .
یک ربات باید از موتوری استفاده کند که داری قدرت بالا و دور مناسب باشد که ربات بتواند آن را کنترل کند و از دور خارج نشود و اگر نتوانستید چنین موتوری را تهیه کنید میتوانید از یک آرمیچر اسباب استفاده کنید به شرطی یک عدد گیر باکس بر سر راه آن بزارید که از سرعت آن بکاهد و قدرت آن بیشتر شود ( سرعت موتور های اسباب بازی زیاد و قدرت آنها کم میباشد ).
چرخ ها
در ساخت این چنین رباتی باید به چند نکته در مورد چرخ ها توجه کرد که عبارتند از :
۱- اندازه قطر چرخ، ۲- اندازه عرض چرخ، ۳- اصطحکاک چرخ با زمین
1- اندازه قطر یک چرخ باید به اندازه ای باشد که با دور موتور شما هماهنگی داشته باشد چون هرچه قطر چرخ بشتر باشد با یک دور، موتور روبات مسیربیشتری را طی میکند و هر چه قطر آن کمتر باشد با یک دور چرخش موتور ربات مسیر کمتری را طی میکند
2- اندازه عرض چرخ : توصیه میشود اندازه عرض چرخ برای این چنین کاری بین 1 تا 2 سانت انتخاب شود چون اگر بیشتر از این باشد اصطحکاک و وزن آن خیلی زیادی میشود
3- برای اصطحکاک چرخ با زمین میتوانید از نوار چسب برق از طرف چسبندگی به زمین استفاده کنید که این کار لاستیک ها بیشتر به زمین میچسباند و تا حدی میتواند به تعادل ربات کمک کند
چرخ هرز گرد :
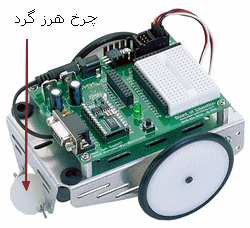
این چرخ که در قست میانی و جلوی ربات نصب میشود تنها وظیفه حفظ تعادل ربات دارد و باید کمترین اصطکاک را با زمین داشته باشد که میتوان از یکه بلبرینگ یا یک عدد ساچمه و یا ... باشد
برد سنسور ( حسگر )


این بخش از ربات که یکی از مهمترین قسمت های یک ربات محسوب میشود و وظیفه تشخیص خط زیر ربات میباشد که باید فاصله استاندارد آن با زمین رعایت شود تا بهترین بازده را دارا باشد
چند نکته که باید در مکانیک ربات رعایت شود :
1- حتما مکانیک ربات محکم بسته شود.
2- اگر از چسب برای بستن استفاده میکنید حتما به همراه بست استفاده شود .
3- برای بستن بردها به بدنه ( شاسی ) حتما از پیچ و مهره یا Spacer و مهره استفاده کنید
4- برای محکم شدن و جلوگیری شل یا باز شدن اتصالات میتوانید از واشر فنری استفاده کنید .
5- در جاهایی که ممکن است پیچ و مهره باعث اتصالات بین قطعات شود میتوانید از واشر فیبری استفاده کنید .
سنسور المان حس کننده ای است که کمیتهای فیزیکی مانند فشار، حرارت،
رطوبت، دما، و ... را به کمیتهای الکتریکی پیوسته (آنالوگ) یا غیرپیوسته
(دیجیتال) تبدیل می کند. این سنسورها در انواع دستگاههای اندازه گیری،
سیستمهای کنترل آنالوگ و دیجیتال مانند PLC مورد استفاده قرار می گیرند.
عملکرد سنسورها و قابلیت اتصال آنها به دستگاههای مختلف از جمله PLC باعث
شده است که سنسور بخشی از اجزای جدا نشدنی دستگاه کنترل اتوماتیک باشد.
سنسورها اطلاعات مختلف از وضعیت اجزای متحرک سیستم را به واحد کنترل ارسال
نموده و باعث تغییر وضعیت عملکرد دستگاهها می شوند.
سنسورهای بدون تماس
سنسورهای بدون تماس سنسورهائی هستند که با نزدیک شدن یک قطعه وجود آنرا حس
کرده و فعال می شوند. این عمل می تواند باعث جذب یک رله، کنتاکتور و یا
ارسال سیگنال الکتریکی به طبقه ورودی یک سیستم گردد.
کاربرد سنسورها
1ـ شمارش تولید: سنسورهای القائی، خازنی و نوری
2ـ کنترل حرکت پارچه و ...: سنسور نوری و خازنی
3ـ کنترل سطح مخازن: سنسور نوری و خازنی و خازنی کنترل سطح
4ـ تشخیص پارگی ورق: سنسور نوری
5 ـ کنترل انحراف پارچه: سنسور نوری و خازنی
6 ـ کنترل تردد: سنسور نوری
7ـ اندازه گیری سرعت: سنسور القائی و خازنی
8 ـ اندازه گیری فاصله قطعه: سنسور القائی آنالوگ
مزایای سنسورهای بدون تماس
سرعت سوئیچینگ زیاد: سنسورها در مقایسه با کلیدهای مکانیکی از سرعت
سوئیچینگ بالائی برخوردارند، بطوریکه برخی از آنها (سنسور القائی سرعت) با
سرعت سوئیچینگ تا 25KHz کار می کنند.
طول عمر زیاد: بدلیل نداشتن کنتاکت مکانیکی و عدم نفوذ آب، روغن، گرد و
غبار و ... دارای طول عمر زیادی هستند.
عدم نیاز به نیرو و فشار: با توجه به عملکرد سنسور هنگام نزدیک شدن قطعه،
به نیرو و فشار نیازی نیست.
قابل استفاده در محیطهای مختلف با شرایط سخت کاری: سنسورها در محیطهای با
فشار زیاد، دمای بالا، اسیدی، روغنی، آب و ... قابل استفاده می باشند.
عدم ایجاد نویز در هنگام سوئیچینگ: به دلیل استفاده از نیمه هادی ها در
طبقه خروجی، نویزهای مزاحم (Bouncing Noise)ایجاد نمی شود.
سنسورهای القائی
سنسورهای القائی سنسورهای بدون تماس هستند که تنها در مقابل فلزات عکس
العمل نشان می دهند و می توانند فرمان مستقیم به رله ها، شیرهای برقی،
سیستمهای اندازه گیری و مدارات کنترل الکتریکی *مانند: PLC *ارسال نمایند.

میکرو کنترلر از دو لغت میکرو + کنترلر تشکیل شده است. میکرو یک واحد خیلی کوچک در ریاضی است. Micro میکرو 10 بتوان منفی 6 است. یعنی یک میلیونیوم چیزی.
Controller کنترلر یعنی کنترل کننده.
میکرو کنترلر یک قطعه الکترونیکی است که زمان انجام یک دستور درآن به میزان یک میلیونیوم ثانیه است. این سرعت خیلی زیادی است.
میکرو کنترلر از نظر شکل ظاهری شبیه یک IC (مدار مجتمع) است. و از نظر عملکرد تقریبا مشابه یک کامپیوتر کامل است.


میکرو کنترلر ها هم دارای ورودی ، هم پردازش و هم خروجی هستند.
اولین میکروکنترلر ها توسط شرکت اینتل همین شرکتی که اکنون بزرگترین تولید کنند سی پی یو های کامپیوتر ها در جهان است در سال 1971 با نام 8080 ساخته شد. بعد از وارد شدن اینتل به چرخه ساخت پروسسورها (سی پی یو ها )امتیاز ساخت میکروکنترلر ها را به شرکت های زیر واگذار کرد.
ATMEL , PHILIPS , SIEMENS , DALLAS
همه میکرو کنترلر ها در 5 دسته زیر تقسم بندی می شوند.
1. 8051
2. PIC
3. Avr
4. 6811
5. Z8
یک ماشین حساب را در نظر بگیرید. ماشین حساب دارای یک میکروکنترلر است که ورودی آن صفحه کلید اعداد آن است ، عملیاتی که برای محاسبه یک عملیات ریاضی انجام می دهد پردازش و LCD که نتیجه بر روی آن نمایش داده می شود خروجی آن است.
برای دریافت سرعت یک میکروکنترلر به فاصله زمانی زدن کلید = (مساوی) و زمان نمایش نتیجه عکلیات مورد نظر در ماشین حساب توجه کنید. این همان سرعت عملکرد یک میکروکنترلر است.
رم یا همان حافظه موقت در درون خود همان میکروکنترلر قرار دارد.
در مقابل میکرو کنترلر یک عبارت دیگر با نام میکرو پروسسور نیز وجود دادر که تفاوت آن با میکروکنترلر در این است که در میکروکنترلرها همه قسمت های ورودی – پردازش – خروجی وجود دارند ولی میکروپروسسور فقط شامل یک پردازنده کوچک است که برای انجام کارهای خود نیازمند ارتباط با واحدهای ورودی و خروجی و ماژولهای رم است.
یک میکروکنترلر وقتی که ساخته می شود هیچ کابردی ندارد و باید ابتدا برای انجام یک کار برنامه ریزی شود، آنوقت قابل استفاده خواهد شد. برای برنامه ریزی میکروکنترلر ها از دستگاهی به نام پروگرمر استفاده می شود. پروگرمر ها به و سیله یک کابل به رایانه متصل می شود و برنامه مورد نظر درون کامپیوتر به زبان سی C یا اسمبلی نوشته می شود و سپس به وسیله یک کابل موازی LPT یا کابل USB به حافظه میکروکنترلر منتقل می شود.اکنون می توان از این میکرو کنترل در مدارات مورد نظر استفاده کرد.
تصویر یک پروگرمر

از میکرو کنترلر ها در موارد مختلفی از قبیل همین موس لیزری که اکنون در دست شماست و شما آن را جابجا می کنید – صفحه کلید رایانه – مانیتور – ماشین حساب – تلوزیون – تابلوهای تبلیغاتی الکترونیکی که در جاهای مختلف می بینید و نوشته های مختلفی برو روی آن حرکت می کند. همگی محصول استفاده از میکرو کنترلر ها هستند.
رباتیک چیست؟
رشد روز افزون دانش بشری انسانها را با دست آوردها و علوم جدیدی آشنا میسازد که قبل از آن شاید تنها ریشه در تخیل داشت رباتیک یکی از تخیلات انسانی است که کم کم پا به عرصه واقعیت نهاده و زندگی بشری را دست خوش تغییرات شگرفی خواهد کرد.
 با سلام حضور همکاران گرامی
با سلام حضور همکاران گرامی